


 首 頁
首 頁 關(guān)于華清
關(guān)于華清 產(chǎn)品中心
產(chǎn)品中心 新聞資訊
新聞資訊 方案
方案 支持與下載
支持與下載 人力資源
人力資源 聯(lián)系我們
聯(lián)系我們
「干貨」中國汽車電子行業(yè)報告——控制器
1.1 汽車電子控制器概論
汽車電子控制器的作用是接收來自傳感器的信息,進行處理,輸出相應(yīng)的控制指令給到執(zhí)行器執(zhí)行,控制器的反應(yīng)速度、判斷準確性至關(guān)重要。隨著計算機技術(shù)和控制理論的不斷發(fā)展,控制器的功能范圍不斷擴大。汽車電子控制單元作為汽車電子控制系統(tǒng)的核心部分,是嵌入式系統(tǒng)裝置,一般包括硬件和軟件兩部份。一般汽車電子控制器硬件結(jié)構(gòu)主要包括微處理器(MCU)、存儲器、輸入& 輸出接口(A/D、D/A 轉(zhuǎn)換器)單元。
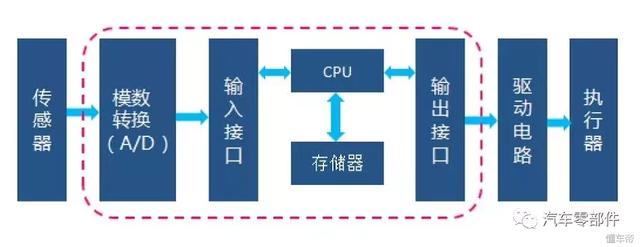
圖 1:典型的汽車電子控制電路框圖
汽車電子控制系統(tǒng)要求有很好的可靠性和實時性,需要滿足嚴苛的ISO 26262 功能安全要求。而汽車電子控制系統(tǒng)控制的變量越來越多,系統(tǒng)架構(gòu)越來越復(fù)雜,對系統(tǒng)的硬件架構(gòu)和系統(tǒng)故障自診斷能力要求更是提出挑戰(zhàn)。根據(jù)統(tǒng)計分析,目前乘用車的汽車電子控制單元(ECU)數(shù)量在25~100 個左右。
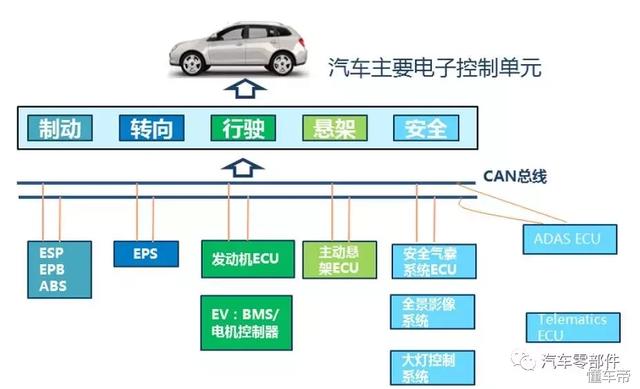
圖2:部分汽車電子控制單元
由于汽車結(jié)構(gòu)的復(fù)雜性、系統(tǒng)的變量多且相互影響,導(dǎo)致難以建立準確的數(shù)學(xué)模型。隨著智能控制的發(fā)展,一般系統(tǒng)級控制采取智能控制方法,執(zhí)行層控制采取經(jīng)典理論控制:建立精確的數(shù)學(xué)模型,精確控制。

圖3:發(fā)送機管理系統(tǒng)ECU
ECU 產(chǎn)業(yè)鏈:
汽車電子控制器硬件的核心在于微處理器。微處理器包括MCU、MPU、DSP 和邏輯IC等。其中市場知名的為微處理器廠家主要有恩智浦、TI、英飛凌、瑞薩、ADI 等公司,電子控制單元(ECU)領(lǐng)先企業(yè)是跨國汽車電子零部件巨頭,如博世、電裝、大陸公司等。

圖4:汽車電子控制單元產(chǎn)業(yè)鏈
汽車用微處理器一直在根據(jù)汽車的要求不斷更新?lián)Q代,以發(fā)動機管理控制單元用微處理器(MCU)為例說明(如圖5),從歐3 到歐6,隨著汽車油耗要求的不斷提高,為達到要求,微處理器也從早期的16 位CPU 到32 位CPU,處理速度(MIPS 指標)不斷加快,所用的存儲器容量也不斷提高。汽車自動駕駛的發(fā)展使得汽車微處理器處理的數(shù)據(jù)量成幾何級增長,需要汽車微處理器有高性能計算能力,特別是汽車識別行人物體的計算機視覺和深度學(xué)習功能要求芯片具有強大的實時計算處理能力。
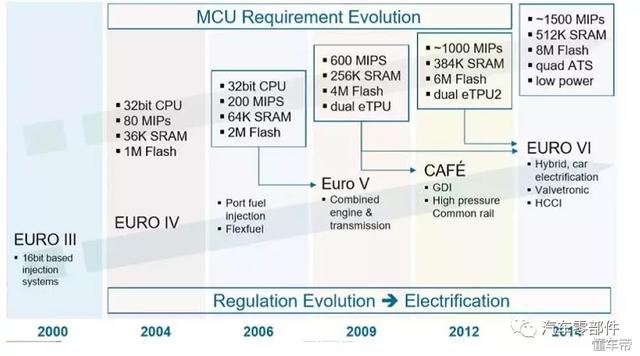
圖5:發(fā)動機用管理系統(tǒng)MCU進化歷程
目前英偉達(NVIDIA)開發(fā)的圖形處理器(GPU)在深度學(xué)習、圖像處理方面處于技術(shù)領(lǐng)先地位,其在2016 年CES展推出的第二代產(chǎn)品DRIVE PX2 是基于16nm 工藝打造的SoC產(chǎn)品,擁有兩顆GPU 核心和12 個CPU 核心,相當于150 臺MacBook Pro 的8T Flops 運算能力,可支持12 路攝像頭輸入、激光定位、雷達和超聲波傳感器,多個平臺并行運算,可以完全實現(xiàn)自動駕駛。2017 年沃爾沃上路的100 輛自動駕駛SUVs 就使用了英偉達DRIVE PX2 芯片。同時奧迪、戴姆勒、福特、豐田等車企也在和英偉達合作開發(fā)車載超級計算解決方案,以加速自動駕駛汽車的實現(xiàn)。
圖6:DRIVE PX2
與此同時,高通宣布了其基于14nm 工藝打造的新一代Snapdragon820A 處理器可以很好地支持深度學(xué)習功能?,F(xiàn)有的汽車微處理器供應(yīng)商如瑞薩,恩智浦、德州儀器、意法半導(dǎo)體(Mobileye EyeQ 芯片代工商)、英飛凌等也將被迫在未來推出16nm 工藝的高性能SoC 芯片產(chǎn)品,瑞薩已經(jīng)宣布了其開發(fā)新一代R-car 處理器時間節(jié)點。由于16nm 工藝所需用的光掩模非常昂貴,而汽車工業(yè)的投資回報率較低,眾多芯片供應(yīng)商的加入將可以形成規(guī)模效應(yīng),提高16nm 工藝芯片的投資回報率。由于汽車智能化的迅猛發(fā)展趨勢,可以預(yù)計汽車的微處理器市場廣闊,據(jù)市場調(diào)研機構(gòu)IHS 公司預(yù)測,2021 年全球汽車微處理器市場可達到約14 億美元的規(guī)模。
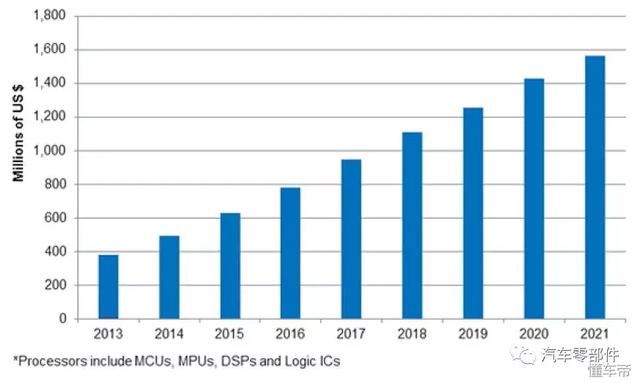
圖7:全球汽車微處理器市場規(guī)模預(yù)測
汽車電子控制單元(ECU)的另一核心是軟件算法。隨著汽車智能化的不斷提高,軟件系統(tǒng)越來越復(fù)雜,整個汽車軟件代碼行數(shù)在1000 萬以上,軟件價值占比不斷上升,開發(fā)成本占汽車電子系統(tǒng)總成本的一半以上,重要性凸顯。
汽車軟件系統(tǒng)包括系統(tǒng)軟件和應(yīng)用軟件兩大部分。系統(tǒng)軟件包括操作系統(tǒng)和一系列實用程序,一般由處理器芯片廠家提供。應(yīng)用軟件包括:1)數(shù)據(jù)采集與過程監(jiān)控模塊;2)數(shù)據(jù)處理模塊;3)控制算法模塊;4)執(zhí)行機構(gòu)控制模塊;5)故障自診斷模塊。
控制理論的不斷突破,為汽車電子控制系統(tǒng)的發(fā)展提供了有力的理論支撐,從早期的經(jīng)典控制理論到現(xiàn)代控制理論再到智能控制理論,與之相對應(yīng),汽車電子控制系統(tǒng)采用的控制技術(shù)由PID 控制到魯棒控制再到神經(jīng)網(wǎng)絡(luò)控制(CNN),控制功能越來越多。
由于汽車結(jié)構(gòu)的復(fù)雜,各個系統(tǒng)相互耦合,一般來說,系統(tǒng)層的控制采取智能控制、模糊控制算法,執(zhí)行層的控制采取建立精準數(shù)學(xué)模型、精確控制的算法。
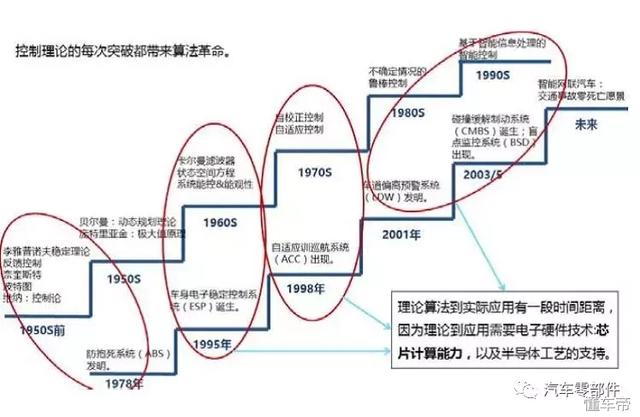
圖8:控制理論的發(fā)展對汽車控制系統(tǒng)的影響
線控技術(shù):
線控技術(shù)(X-by-Wire)是通過線束傳遞信號控制,而不是通過機械連接裝置來操控,對汽車機械結(jié)構(gòu)進行了一個根本的變革,其本質(zhì)就是利用弱點信號來控制強電執(zhí)行機構(gòu),以取代原先的機械或者液壓來操縱執(zhí)行。
線控技術(shù)是基于信息交互處理和實時控制的新型電控系統(tǒng),需要高性能的控制器和高速總線支持。
典型的線控系統(tǒng)有線控轉(zhuǎn)向(Steer-by-Wire)、線控制動(Brake-by-Wire)、線控油門(Throttle-by-Wire)等。線控技術(shù)(X-by-Wire)代表了一系列的車輛綜合控制技術(shù)。
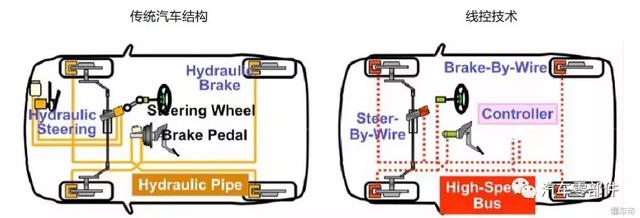
圖9:線控技術(shù)對汽車結(jié)構(gòu)的變革
X-by-Wire 技術(shù)可使汽車更加的輕便、便宜、安全并且使用更加經(jīng)濟,基于X-by-Wire 技術(shù)研發(fā)的這些系統(tǒng)可以很輕易的應(yīng)用到各種車型上去,而不需要做大的修改和調(diào)校。通過X-by-Wire 技術(shù)可以進行整合的汽車底盤綜合系統(tǒng)可以極大的提高車輛的安全性、操控穩(wěn)定性和燃油經(jīng)濟性等。
下面介紹線控轉(zhuǎn)向系統(tǒng)(Steer-by-Wire)的具體應(yīng)用。
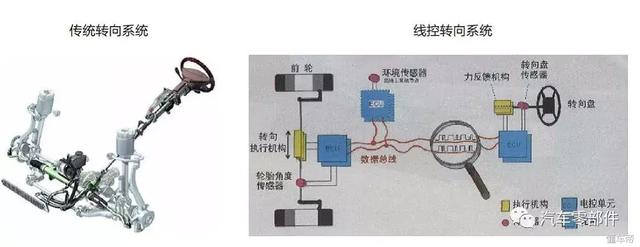
圖10:傳統(tǒng)轉(zhuǎn)向系統(tǒng)與線控轉(zhuǎn)向系統(tǒng)的對比
如上圖所示,線控轉(zhuǎn)向系統(tǒng)取消了傳統(tǒng)的機械轉(zhuǎn)向裝置,轉(zhuǎn)向器與轉(zhuǎn)向柱之間無機械連接。整個系統(tǒng)主要由轉(zhuǎn)向盤舵角傳感器、轉(zhuǎn)向ECU、轉(zhuǎn)向執(zhí)行機構(gòu)、力矩反饋電機和環(huán)境傳感器等組成。線控轉(zhuǎn)向的好處在于提高了整車設(shè)計自由度,沒有了機械連接,便于系統(tǒng)布置;轉(zhuǎn)向效率高,響應(yīng)迅速,可在瞬間提供轉(zhuǎn)向動力;有利于改善駕駛特性,增強操縱性;有利于整合底盤技術(shù)和降低底盤開發(fā)綜合成本。
目前所有領(lǐng)先車企和零部件企業(yè)都在開發(fā)線控技術(shù)產(chǎn)品。TRW 公司開發(fā)的線控系統(tǒng)使得燃油經(jīng)濟性提高5%,德爾福、博世、法雷奧也紛紛開發(fā)了線控技術(shù)產(chǎn)品。
技術(shù)趨勢:
(1)汽車電子架構(gòu)發(fā)展趨勢:汽車電子控制系統(tǒng)越來越復(fù)雜,系統(tǒng)存在較大的故障潛在隱患。未來基于高性能總線技術(shù)的分布式計算架構(gòu)將改善這種情形。
(2)半導(dǎo)體工業(yè)的驅(qū)動: ITRS 2012 發(fā)布全球集成電路發(fā)展路線圖,未來集成電路將沿著“延續(xù)摩爾定律”(Moore)、“超越摩爾定律”(More than Moore)和“超越CMOS”(Beyond Moore) 方向發(fā)展。“延續(xù)摩爾定律”通過不斷縮小尺寸升級產(chǎn)品,如SoC;“超越摩爾定律”通過系統(tǒng)級封裝(SiP)等實現(xiàn)功能的集成。
2.1 常見控制單元介紹
2.1.1 車身穩(wěn)定電子控制
系統(tǒng)(ESC)
汽車在行駛過程中由于橫擺和側(cè)偏運動產(chǎn)生側(cè)向失穩(wěn),橫擺控
制力矩通過對作用在車輪上的制動力或者驅(qū)動力進行有效的分配,就會產(chǎn)生一個作用在整車上的橫擺力矩。通過控制這個橫擺控制力矩,汽車的橫擺和側(cè)偏運動就能有效的控制。這就是車身電子穩(wěn)定控制系統(tǒng)(ESC)的工作原理。
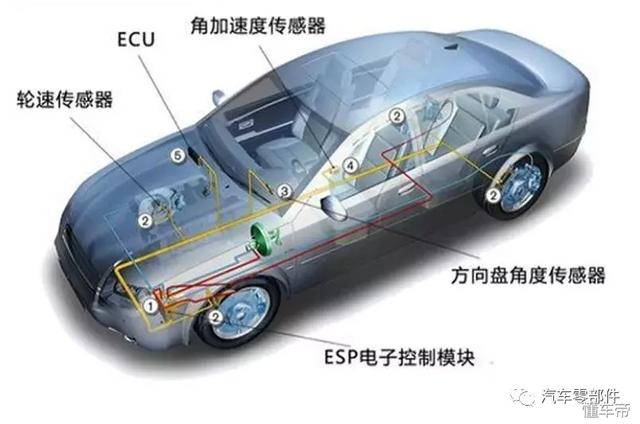
車身電子穩(wěn)定控制系統(tǒng)(ESC)是在ABS(防抱死系統(tǒng))和ASR(驅(qū)動防滑系統(tǒng))基礎(chǔ)上發(fā)展起來的,并增加了方向盤舵角傳感器、橫向/ 縱向加速度傳感器和橫擺角速度傳感器等。通過傳感器和控制器來識別汽車實際運動狀態(tài)和駕駛員意愿,進行比較判斷,然后發(fā)出指令調(diào)節(jié)車輪縱向制動力大小以匹配汽車的橫擺運動,提高汽車行駛安全性。
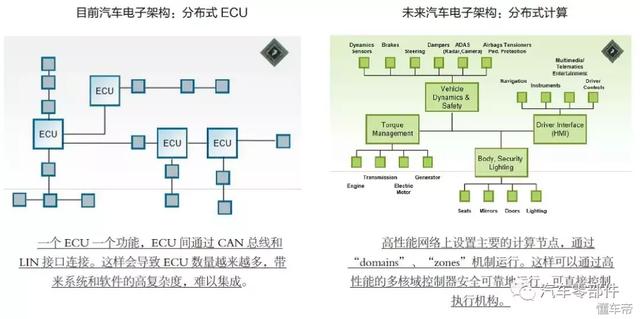
圖11:常見的控制單元
2.1.2 電動助力轉(zhuǎn)向系統(tǒng)(EPS)
EPS:主要由電子控制單元、助力電動機、減速器、轉(zhuǎn)向柱、轉(zhuǎn)向機、轉(zhuǎn)矩傳感器、車速傳感器、舵角傳感器等組成。
當操縱方向盤時,裝在轉(zhuǎn)向柱上的扭矩傳感器不斷地測量轉(zhuǎn)矩、轉(zhuǎn)角信號,該信號與車速信號同時輸入到電子控制單元ECU,經(jīng)過ECU 計算處理后控制電動機輸出相應(yīng)大小和方向的轉(zhuǎn)矩信號,電動機的助力轉(zhuǎn)矩通過減速器減速增矩后加到轉(zhuǎn)向系統(tǒng)中,以實現(xiàn)汽車助力轉(zhuǎn)向的作用。
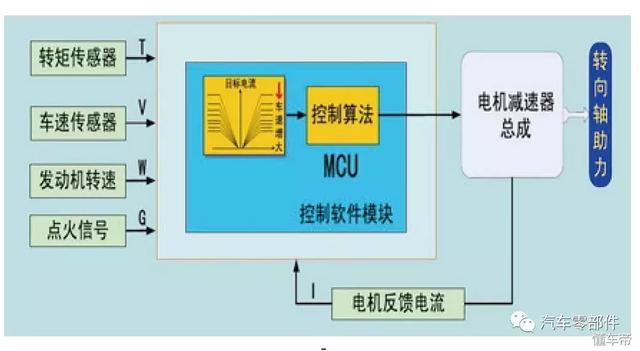
圖12:電動助力轉(zhuǎn)向示意圖
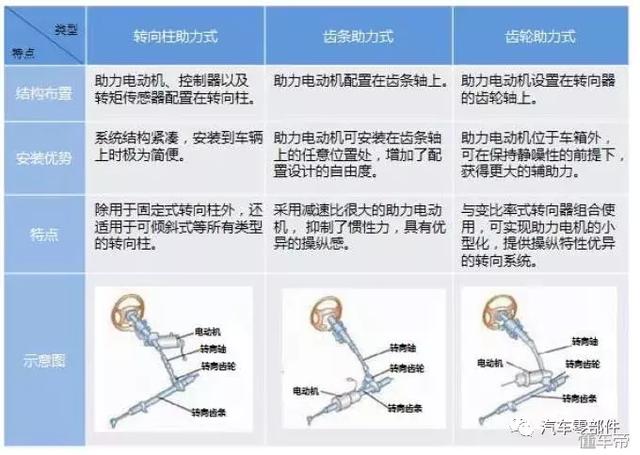
按照助力電機安裝的形式,EPS可以分為以下三種類型:轉(zhuǎn)向柱助力式(C-EPS)、齒條助力式(R-EPS)、齒輪助力式(P-EPS)。
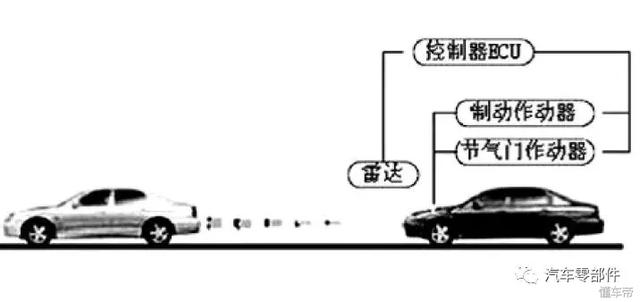
2.1.3 自適應(yīng)巡航系統(tǒng)(ACC)
自適應(yīng)巡航控制系統(tǒng)(Adaptive Cruise Control,簡稱ACC)是在定速巡航控制系(CC)基礎(chǔ)上發(fā)展起來的。在車輛行駛過程中,安裝在車輛前部的毫米波雷達持續(xù)掃描前方道路,同時輪速傳感器采集車速信息,當與前車之間的距離過小時,控制單元通過CAN 總線傳輸信號與ABS 系統(tǒng)、發(fā)動機控制系統(tǒng)協(xié)調(diào)動作,使車輪適當制動和發(fā)動機輸出功率下降,以保持與前方車輛一定的安全的距離。當需要更大的減速度時,控制器會發(fā)出聲光信號通知駕駛者主動采取制動動作。ACC 系統(tǒng)一般在大于25Km/h 速度時才作用,低于這個速度需要駕駛者控制速度。
2018-05-11 來源:頭條號汽車零部件
免責聲明:本文僅代表作者個人觀點,與摘抄信息網(wǎng)無關(guān)。其原創(chuàng)性以及文中陳述文字和內(nèi)容未經(jīng)本站證實,對本文以及其中全部或者 部分內(nèi)容、文字的真實性、完整性、及時性本站不作任何保證或承諾,請讀者僅作參考,并請自行核實相關(guān)內(nèi)容。
版權(quán)聲明:本文系網(wǎng)絡(luò)轉(zhuǎn)載,已標明出處。如需轉(zhuǎn)載,請點擊原文來源出處,聯(lián)系作者進行轉(zhuǎn)載。

